昨日現在の限界?
毎夜トライはしているのですが・・・
Higlasi-2.1 + 赤緯ユニット(タンジェントアーム式評価版) 現状は以下の通りです。
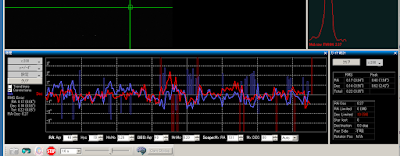 MxDECを80とし、ファームウエアはPHDからの1発の信号でDECを最小回転角動くように制御します。(制御量が足らない場合、数発の信号が必要)
MxDECを80とし、ファームウエアはPHDからの1発の信号でDECを最小回転角動くように制御します。(制御量が足らない場合、数発の信号が必要)
 前回と比較し多少は良いのですが、もう一つ二つ気に入りません。
前回と比較し多少は良いのですが、もう一つ二つ気に入りません。
赤緯ユニットは面白いのですが、売り物に昇格させるためにはもう少し(いっぱい?)検討が必要です。
まぁ、安定に±1秒角に入れたいですね。。。
Higlasi-2.1 + 赤緯ユニット(タンジェントアーム式評価版) 現状は以下の通りです。


赤緯ユニットは面白いのですが、売り物に昇格させるためにはもう少し(いっぱい?)検討が必要です。
まぁ、安定に±1秒角に入れたいですね。。。



コメント
テストお疲れ様です
ガイドエラーについてですが、基本性能がでていれば、それほど神経質になることもないかもですね
ポタ赤の予定する焦点距離には現状でも過剰性能と言える位の精度でしょう
もっとも、そのこだわりの開発姿勢こそがHiglasiの魅力ですが
お気の済むまで、存分にこだわって下さい
私もユーザーとして気長に待ちます(笑)
ただ、これから寒くなりますので無理をなさらぬようお願い致します
何らかのPHDの設定に起因すると思うのですが…