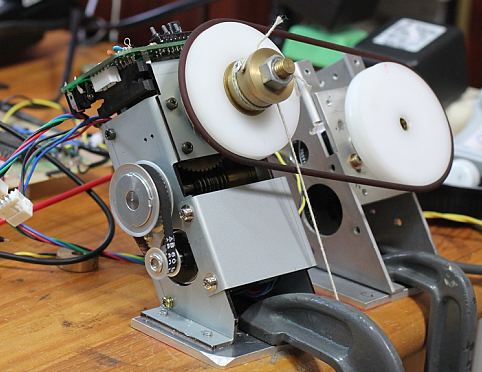
ベルトドライブテストのための部品待ちで、いずれは書かなくてはならない、最も不得意な取扱説明書を書いてます。
先ずは主な仕様(暫定)を・・・不明点はお問い合せください。
主な仕様 (暫定)
・名称
Higlasi-2A
・形式
星野星景写真撮影用小型赤道儀
・重量
約 1100g
・大きさ
79*149*71(除:突起物)
・最小ステップ角
1.191秒角
・ピリオディックモーション±10秒角以下(
弊社製作測定器による値)
・ピリオディックモーション周期 24分
・駆動
マイコン制御による0.9degハイブリット型ステッピング・モータ
・駆動速度制御
恒星速度の0.5倍~500倍速
・東西早送SW
極軸を増速して時角を微動、1秒以上の長押で高速回転します。
・早送微動
100倍速
・早送高速
900倍速
・DPPA(カーチスデジカメ法)
500倍速 44deg
・極望
視界約6度の極軸調整穴
・重心移動による極軸補正用レーザー取付穴(予定)
・恒星追尾モード12.623PPS (キングスレート)
・月追尾モード恒星追尾モードの96.35%(平均速度)
・太陽追尾モード恒星追尾モードの99.727%
・星景撮影モード 恒星追尾モードの66%
・北半球駆動モード(初期値)、南半球駆動モード
・トルク切替
100%(初期値) 70% 130%
・極軸トルク100%
極軸から10cm位置で4kg以上 (参考値)(初期値)
・極軸トルク 70% 極軸から10cm位置で2.5kg以上 (参考値)
・極軸トルク130% 極軸から10cm位置で5kg以上 (参考値)
・シャフト径
10mm
・ベアリング数
4
Φ18mm:2
Φ26mm:2
・ウォームホイール
直径48mm 60歯 真鍮製
・メカのバラツキ補正方法 誤差をモータードライブクロックで補正(
ここの追記を参照ください)
・電源電圧 6v-12v 単三電池6~8本(Ni-MH推奨)
・消費電力 (トルク100%時) 3w以下(スタンバイ時0.1w以下)
・駆動時間8時間(トルク100%、エネループ1900mA品8本使用時の参考値)
・最大荷重 3.5kg
 |
| Higlasi エンジン ver.2 |